
Romo pour la didactique
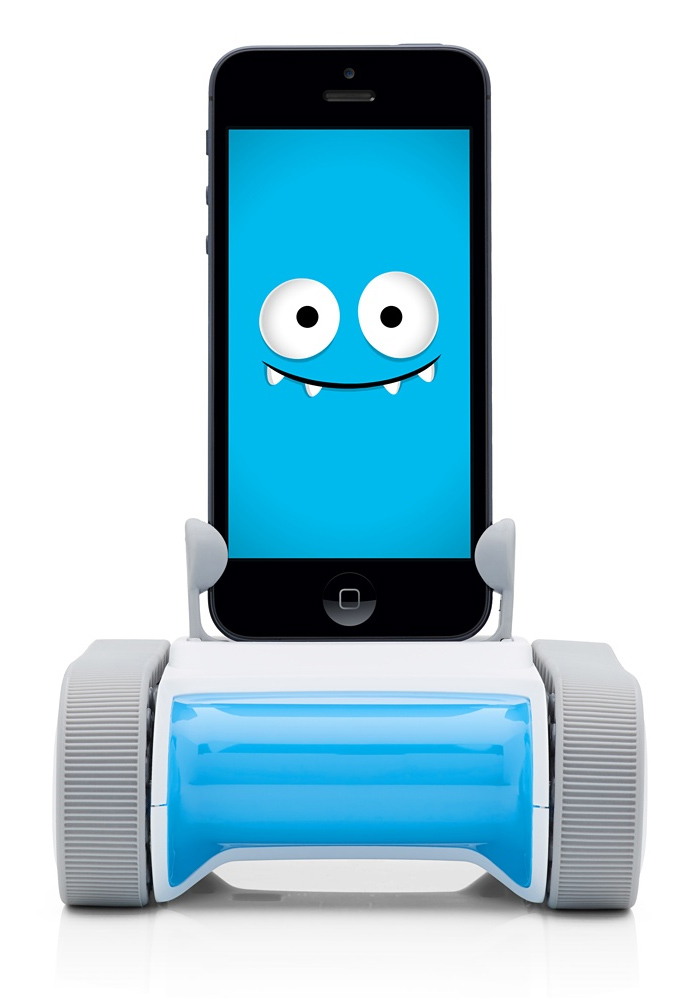 Romo (Société Romotive www.romotive.com ) est une petite base motorisée tractée par des chenils sur lequel on branche son iPhone 5. Après avoir téléchargé l'application vous pouvez immédiatement interagir avec lui.
Romo (Société Romotive www.romotive.com ) est une petite base motorisée tractée par des chenils sur lequel on branche son iPhone 5. Après avoir téléchargé l'application vous pouvez immédiatement interagir avec lui.
Après une charge complète vous avez 6 heures d'autonomie.
Pour qui : pour des enfants de la scolarité obligatoire, mais aussi pour étudier la programmation robotique au secondaire 2 avec son kit développeur http://www.romotive.com/developers/
Pourquoi : différemment des robots habituels Romo prend en considération des « pseudo émotions » très basiques, certes, mais utiles par exemple pour des enfants en situation d'handicap. De plus on peut relier ces émotions avec des évènements extérieurs : un bruit, un visage, une couleur, une caresse, un tapotement...
Le plus : On peut le conduire comme une petite voiture à l'aide d'un autre appareil partageant le même réseau wifi pour une conduite assistée et pour toute activité de compagnonnage.
Romo en quelques mots et quelques images
Voilà en quelques images ce que Romo peut faire :
Romo arrive d'une planète inconnue chez les humains. Grâce à l'écran de notre iPhone peut exprimer ses émotions. Défis et apprentissages nous poussent à interagir avec lui dans un esprit coopératif et collaboratif. Il est capable de reconnaitre les couleurs et peut nous suivre dans nos mouvements. Dans un espace virtuel de jeu on peut conduire Romo dans des courses poursuites.
Il répond aux stimulis visuels et auditifs de l'environnement. Il est capable de se connecter en vidéoachat avec les personnes de notre entourage.
Voilà les étapes et les défis pour une prise en main progressive :
- Première manifestation de Romo
- Insertion nom du propriétaire
- Insertion du nom du robot
Missions (chaque mission positivement complétée débloque l'activité)
1. Planète 1 (missions bouger)
Avancer
1.1. Avancer rapidement (régler distance et vitesse avec le curseur)
1.1.1. Recommandation (« je dois être au sol)
1.2. Théorie des cordes : associer 2 mouvements : avancer (distance et vitesse à régler) tourner (angle, diamètre droite, gauche ) http://youtu.be/q4F3dWlCcZc
Pour chaque mission on sait si on a réussi ou pas et avec quel niveau de compétence. Un retour animé souligne les « émotions » http://youtu.be/x452n6yh59A
du robot
1.1. Avancer et reculer
1.2. Suppression d'une commande
1.3. Dessiner un triangle (angle, diamètre, gauche/droite) http://youtu.be/WSCMFehZXJc
1.4. Dessiner un carré http://youtu.be/49cbHqH1Kao
1.5. Hocher la tête http://youtu.be/5J6PfDv9iFg
1.6. Dire non http://youtu.be/ITgZLgoGBf0
1.7. Tango Romotion (mouvement et pause)
1.8. Devinette couleur http://youtu.be/A0THtugng10
Romo peut aussi interagir avec l'appareil photo de l'iPhone
2. Planète 2 (missions interaction)
2.1. Associer le tapotement du visage avec une émotion (curieux, excité, bailler, tomber amoureux, youpi !, ricaner, se montrer triste, se montrer étourdi, rire, et 5 autres encore bloquées)
2.2. Associer les chatouilles avec une émotion/action
2.3. Action quand je vois un visage
2.4. Réaction quand l'iPhone est sur la base et quand on le déconnecte
2.5. Réaction de Romo quand on le secoue (dans un esprit un peu déplacé Romo pète quand on le secoue)
2.6. La réaction de Romo quand on le lève de terre et quand on le pose par terre
Cette partie de la découverte de Romo nous permet d'aller plus à fond dans ses émotions et ses réactions. On peut considérer la partie d'interaction sociale où le côté humanoïde est plus évident (caresses et chatouillements)
3. Planète 3 (missions exploration)
3.1. Arrêter de hoqueter. Un bruit (un peu comme dans la réalité) est sensé faire arrêter le hoquet de Romo
3.2. Détecter un mouvement (représente aussi le côté surveillance possible avec Romo)
3.3. Veilleuse (reconnaissance d'une pièce éclairée ou non)
3.4. Réaction en cas d'obstacle (évidemment les possibilités sont limités : reculer ou tourner à droite ou à gauche)
3.5. Reconnaissance de la couleur préférée (le bleu) et prise de photo sur un avancement au hasard de 90 secondes.
3.6. Romo suit un parcours dessiné sur l'écran (il est tout de même difficile d'établir la proportion entre les dimensions du dessin et le déplacement sur le terrain).
Une fois le niveau 3 atteint une animation se déclenche pour faire comprendre que la phase d'instruction est terminée et que le robot est prêt pour le défi de la course.
Deux étapes nous attendent encore :
La conduite à distance à travers Romo Cotrol (sur iPad iPhone ou ordinateur) et la course en suivant une ligne au sol.
Avec Romo control on peut piloter la voiture avec une manette virtuelle et voir à travers la caméra de l'appareil.
Avec Romo control on peut aussi effectuer des visioconférences
Maintenant toutes les possibilités sont ouvertes
Il reste encore la possibilité de dessiner au sol un tracé colorié (par exemple avec du ruban adhésif) et de laisser Romo le suivre. Pour une bonne réussite il faut choisir une couleur assez forte et différente du sol et un écartement suffisant entre les branches du parcours
Finalement on retrouve dans le labo tout ce qu'on a appris à faire executer à Romo et c'est ici qu'on peut expérimenter et revoir toutes les possibilités d'association des commandes
En conclusion
Romo représente une machine humanoïde qui permet en même temps de la conduite et de l'interaction avec des variantes (ton de la voix, couleurs, expression du visage, réaction au touché) qui manquent souvent dans d'autre produits. L'absence de ces aspects est souvent la cause du désintérêt des filles à l'apprivoisement des robots et de la robotique.
Au niveau didactique on peut imaginer aussi bien de la programmation, des parcours à accomplir, du téléguidage pur apprivoiser l'espace, de la géométrie élémentaire, de la planification...
Par contre, ce qui manque à cette dernière version, c'est la synthèse vocale/reconnaissance vocale (déjà très performante sur les iphones mais pas implémentée da Romo) et la possibilité d'effectuer des calculs (le côté savant des Robot)